
В последние годы беспилотники становятся все более популярными, они используются во многих областях, таких как геодезия, картография, гонки, логистика и т.д.
Именно благодаря широкому распространению мультироторные БПЛА сегодня играют важную роль в беспилотной технике.
В этой статье мы расскажем о типах и принципах работы мультироторных БПЛА.

Что такое мультироторный беспилотник?
Мультироторные БПЛА - это беспилотники, которые для создания подъемной силы используют более двух роторов с вращающимися лопастями с фиксированным шагом. Угол наклона ротора фиксирован, а не изменяется, как в вертолете. Изменяя скорость вращения разных роторов, можно изменять крутящий момент движущей силы, чтобы управлять траекторией полета летательного аппарата.
Мультиротор относительно прост и стабилен. Внешний вид мультироторного летательного аппарата, реализованного в настоящее время, намного меньше, чем у самолета, поэтому он подходит для работы в промышленности и для использования на отдыхе.
Мультироторный дрон прост в управлении и может взлетать и садиться вертикально без взлетно-посадочной полосы. Надежность мультироторного беспилотника в основном зависит от бесщеточных двигателей, поэтому двигатели отличаются повышенной надежностью.
В то же время мультироторные БПЛА с простым управлением и высокой стабильностью широко используются во многих промышленных и сельскохозяйственных областях.
В сельскохозяйственной сфере фермеры могут быстро научиться управлять мультироторными беспилотниками, а также нести различные виды полезной нагрузки, например, жидкие пестициды или семена. Таким образом, они очень эффективны для опрыскивания и посева.
В промышленности БПЛА используются для картографирования в горнодобывающей промышленности и наблюдения. На транспорте они значительно повышают эффективность работы.
на фотографии T-DRONES M690B
Какие бывают типы мультироторных дронов?
Различные конфигурации подходят для разных областей применения, при этом они отличаются по времени полета, маневренности, устойчивости и грузоподъемности.
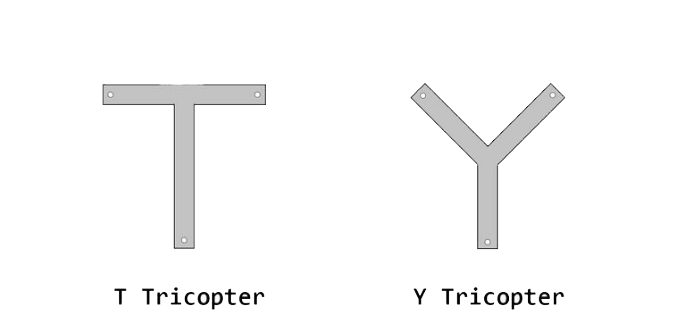
Распространенные конфигурации мультироторных дронов включают «Т»-образную форму, «Y»-образную форму, «плюс»-образную форму, «X»-образную форму и т.д. Выбор типа и формы мультиротора зависит от того, что вам больше подходит.
1. Триротор
Триротор, как следует из названия, состоит из трех роторов для создания устойчивости и используется для движения и управления. Расстояние между роторами обычно составляет 120 градусов, при этом они обычно имеют форму буквы «Y», а иногда и форму буквы «T». Преимуществами триротора являются его малый размер, низкая стоимость и гибкость, так как для него требуется всего три ротора, что является относительно недорогой конфигурацией. В то же время он обладает меньшей подъемной силой из-за количества двигателей.
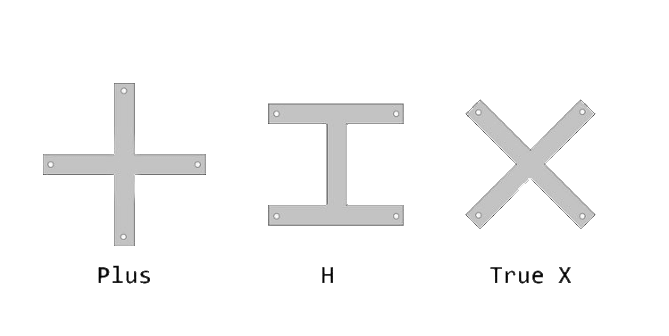
2. Квадрокоптер
Квадрокоптеры - распространенный тип мультикоптеров, наиболее популярные из которых имеют форму «X» и «H». Четыре двигателя установлены на симметричной раме, и каждый луч обычно расположен под углом 90 градусов в конфигурации X4. Два мотора вращаются по часовой стрелке, а два других - против часовой стрелки, создавая противоположные силы для поддержания баланса. Это позволяет достичь идеальных характеристик по цене, стабильности и продолжительности полета.
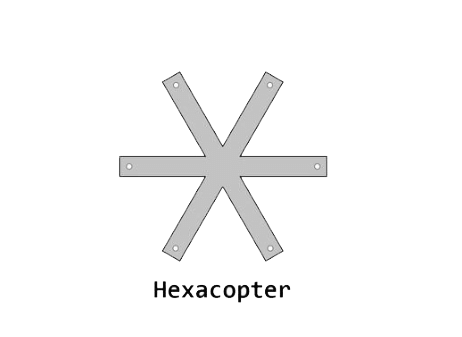
3. Гексакоптер
Гексакоптер установлен на симметричной раме, и каждый луч обычно имеет угол 60 градусов. По сравнению с квадрокоптером, гексакоптер имеет больше двигателей для увеличения мощности и стабильности. В то же время, в нем также повышена надежность системы резервирования, так что даже если двигатель откажет во время полета, он все равно сможет нормально работать в воздухе и благополучно приземлиться. Однако моторы потребляют больше энергии, поэтому время полета сокращается. Это также похоже на квадрокоптер: три мотора вращаются по часовой стрелке, а три других - против часовой стрелки, создавая противоположные силы для поддержания баланса.
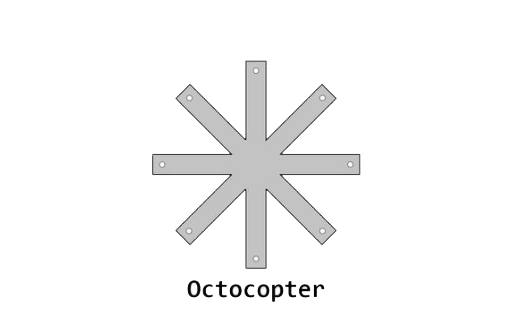
4. Октокоптер
У октокоптера обычно восемь роторов, поэтому он обладает высокой устойчивостью и мощностью, способен брать большую полезную нагрузку и сильнее сопротивляется ветру. Он больше похож на модернизированный квадрокоптер и гексадекоптер. Октокоптеры часто используются для съемок фильмов или профессиональных целей, на них можно устанавливать более тяжелые камеры и объективы. Но из-за увеличения количества двигателей он быстро расходует энергию, а размер рамы дрона получается большим.
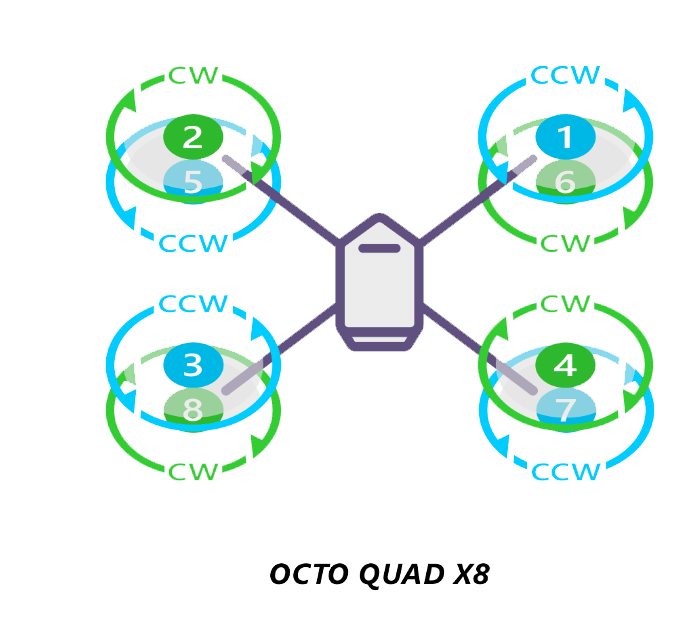
5. Соосный мультироторный дрон
Существует также особый тип мультироторных дронов, названный соосным мультироторным БПЛА. Соосные роторы - это пара роторов, установленных на соосных осях, имеющих одну и ту же ось вращения, но вращающихся в противоположных направлениях.
Например, типичный соосный октокоптер также известен как соосный дрон X8, который использует 8 двигателей, установленных на 4 кронштейнах, и представляет собой модернизированный квадрокоптер с большей мощностью и меньшим пространством. Продукт MX860 использует раму соосного дрона X8, что в значительной степени отражает особенности небольшого размера и большой полезной нагрузки.
Больше информации про данный тип дронов в сообществе НИИ Коптеро и подвесостроения в статье Ильи Липина Про коптеры соосники и эффективность
Каковы преимущества и недостатки мультироторных дронов?
В настоящее время мультироторные БПЛА очень распространены и широко используются для развлекательных и профессиональных промышленных целей. Широкое распространение они получили благодаря преимуществам нескольких роторов.
1. Простота управления и эксплуатации. Мультироторные беспилотники имеют простую конструкцию. Он прост в управлении и подходит для новичков.
2. Подходит для различных мероприятий. Сильно маневренный мультироторный дрон способен зависать в воздухе, взлетать и садиться вертикально. Он обеспечивает узкое пространство для взлета и посадки. Он идеально подходит для фото- и видеосъемки.
3. Низкая стоимость. Мультироторный БПЛА не имеет много сложных аксессуаров, поэтому его стоимость производства и обслуживания ниже, чем у других дронов.
4. Удобство для пилотов беспилотников. Мультироторные БПЛА обычно имеют небольшой размер, они гибкие и портативные, что обеспечивает неограниченное удобство для пилотов беспилотников.

на фотографии квадрокоптер
Однако у дронов есть не только преимущества. Давайте рассмотрим недостатки мультироторных дронов.
1. Малое время полета. Большинство мультироторных дронов питаются от аккумуляторов, емкость которых при нынешних технологиях ограничена. Таким образом, скорость и выносливость БПЛА ограничены. При длительном полете мультироторные дроны вынуждены будут возвращаться обратно, когда закончится заряд батареи, прежде чем выполнить поставленную задачу. Новая литий-ионная батарея T-DRONES с высокой плотностью энергии и большой емкостью может значительно увеличить время полета дронов, и это решит проблему короткого времени полета для вас.
2. Невозможность работы в суровых условиях. Имея возможность взлетать и садиться только в горизонтальном положении и небольшие размеры, мультироторные БПЛА обычно способны нести относительно меньшую полезную нагрузку, чем другие беспилотники, что делает их менее пригодными для работы в некоторых суровых условиях.

на фотографии октокоптер
Как работает мультироторный беспилотник?
Мультироторные БПЛА способны летать в основном в соответствии со знаменитым третьим законом Ньютона. Мультироторный БПЛА управляется двигателем, который заставляет пропеллер создавать подъемную силу и летать. Например, для четырехроторного беспилотника, когда суммарная подъемная сила четырех пропеллеров равна общему весу летательного аппарата, подъемная сила летательного аппарата уравновешивается силой тяжести, и он может зависнуть в воздухе. Итак, давайте рассмотрим принцип работы мультироторных БПЛА.
Как ротор влияет на работу мультироторного беспилотника?
Для движения БПЛА ротор является важной частью аэродинамики. Дрон использует роторы для приведения в движение и управления. В движение его приводят в основном электродвигатели, регулятор скорости (ESC) и пропеллеры, которые также известны как силовая установка БПЛА. Когда дрон запускается, электричество от аккумулятора передается через луч на силовую установку, которая вращает двигатели и пропеллеры, преобразуя электричество в кинетическую энергию.
За счет вращения двигателей и пропеллеров генерируется воздушная энергия, которая позволяет дрону зависать и подниматься вверх. Когда дрон движется относительно воздуха с определенной скоростью и углом атаки, он генерирует аэродинамическую силу для вертикального перемещения.
Двигатели дрона спроектированы таким образом, чтобы одна половина двигателей дрона вращалась по часовой, а другая - против, но с одинаковой скоростью. Это позволяет им противодействовать силам вращения, оказываемым друг другом на корпус дрона, тем самым сохраняя его устойчивость.

на фотографии квадрокоптер
Как мультироторные дроны создают подъем и спуск?
БПЛА использует роторы для приведения в движение и управления. Роторы похожи на вентиляторы, потому что они работают аналогичным образом. Все силы действуют попарно, и вращающиеся лопасти толкают воздух вниз, а значит, когда ротор толкает воздух вниз, воздух толкает ротор вверх. Это и есть основной принцип подъемной силы. Когда подъемная сила превышает силу тяжести самого дрона, он может двигаться вверх. Чем быстрее вращается ротор, тем больше подъемная сила, и наоборот.
Как мультироторные дроны двигаются вперед?
Движение мультироторного дрона вперед происходит по тому же принципу относительности силы, что и создание подъемной и опускающей силы. Регулируя скорость вращения моторов, задние моторы ускоряются, а передние замедляются, таким образом, ротор толкает воздух, создавая силу и придавая тягу для движения дрона вперед.
Оригинал статьи: https://www.t-drones.com/blog/multirotor-drone-guide.html
")


