
Создание роботов и автоматизированных систем невозможно без использования таких устройств, как сервоприводы, или, как их еще называют, сервомоторы. В отличие от стандартных электрических двигателей, которые способны вращать вал в одном из направлений без остановки, сервоприводы предоставляют возможность движения с высокой точностью. Регулируя скорость вращения обычного электромотора, можно изменять частоту и напряжение (для моторов переменного тока) или управлять шириной управляющих импульсов (для постоянного тока). Однако для решения задач, связанных с поворотом вала на определенный угол или поддержанием заданной скорости вращения, незаменимыми являются именно сервоприводы.
В сфере моделирования и авиамоделирования сервоприводы используются для точного контроля положений различных компонентов, таких как рули, выдвижные шасси, закрылки и прочие подвижные элементы.
Ключевые характеристики сервоприводов
- Крутящий момент является одной из наиболее значимых характеристик сервоприводов. Этот параметр напрямую зависит от напряжения питания устройства.
- Рабочее напряжение. Для работы сервоприводов важно подавать напряжение в допустимых пределах. Протоколы и диапазоны рабочих напряжений для каждой модели можно найти в их технической документации.
- Максимальный угол поворота. Хотя большинство сервоприводов способны поворачиваться на угол до 180°, существуют модели, предлагающие более широкий диапазон движения. Кроме того, есть и сервоприводы постоянного вращения, которые могут бесконечно вращаться в одном направлении с заданной скоростью и при этом полностью останавливаться.
- Скорость поворота вала сервопривода определяется временем, необходимым для его поворота на 60°. Например, если скорость составляет 0,08 секунды, это значит, что для поворота на 60° сервоприводу потребуется 0,08 секунды.
- Габариты и масса также играют важную роль при выборе сервопривода для различных приложений, особенно для авиационных моделей.
| модель | Крутящий момент M, кг/см | Рабочее напряжение, В | Максимальный угол поворота, градусы | Скорость поворота на 60° (сек) (градусы в секунду) | Тип | Размеры и вес, мм и г |
| Сервопривод KST FZ589 | 6 кг/см при 6.0 В; | 6 - 8.4 | 45° | 0.12 сек/60° при 6 В | цифровой | 35*15*32,5/40 г |
| 7 кг/см при 7.4 В | 0.11 сек/60° при 7.4 В | |||||
| 8 кг/см при 8.4 В | 0.10 сек/60° при 8.4 В | |||||
| Сервопривод KST BLS815 HV | 14 кг/см при 6.0 В; | 6 - 8.4 | 50° | 0.09 сек/60° при 6 В | цифровой | 40*20*38/73 г |
| 17 кг/см при 7.4 В | 0.08 сек/60° при 7.4 В | |||||
| 20 кг/см при 8.4 В | 0.09 сек/60° при 8.4 В | |||||
| PowerHD 1501MG | 15.5 кг/см при 4.8 В, | 4.8 - 6.0 | 180° | 0.16 сек/60° при 4.8 В | аналоговый | 40.7×20.5×39.5/60 г |
| 17 кг/см при 6.0 В | 0.14 сек/60° при 6 В |
Устройство сервопривода
Сервоприводы функционируют на основе принципа обратной связи. Внутренний контроллер обрабатывает управляющий сигнал и сравнивает его с текущим положением оси. При необходимости он отправляет управляющий импульс на электромотор для приведения вала в нужное положение или поддержания необходимой скорости вращения.
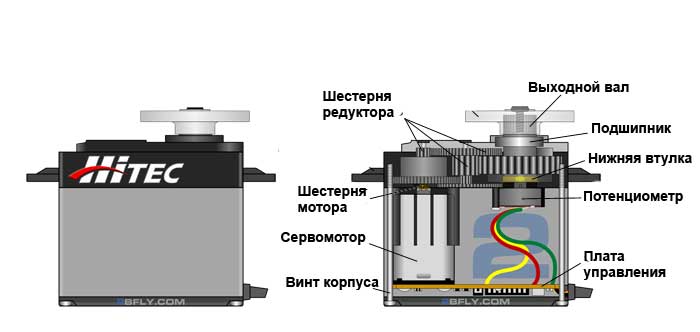
Основные компоненты, из которых состоит сервопривод:
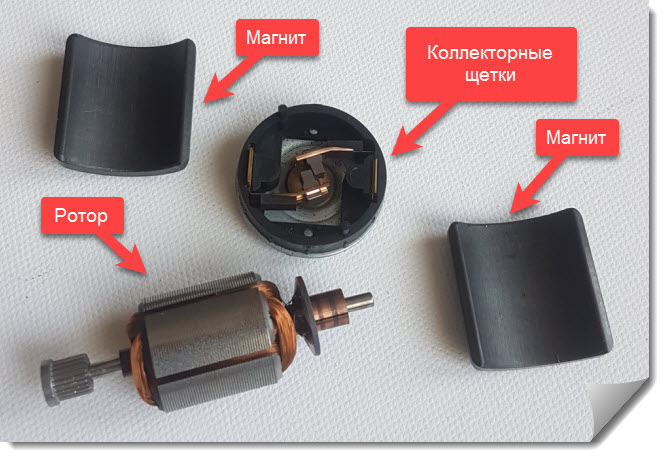
- Мотор: Основной элемент, обеспечивающий вращение оси. В небольших моделях обычно используют постоянные токовые моторы, а в простых конструкциях — коллекторные двигатели.
- Редуктор: Этот компонент снижает скорость вращения вала, который в противном случае был бы слишком высоким. Редукторы могут быть как пластиковыми, так и металлическими. Пластиковые шестерни легкие, тихие и устойчивы к коррозии, тогда как латунные более надежны и точны при позиционировании.
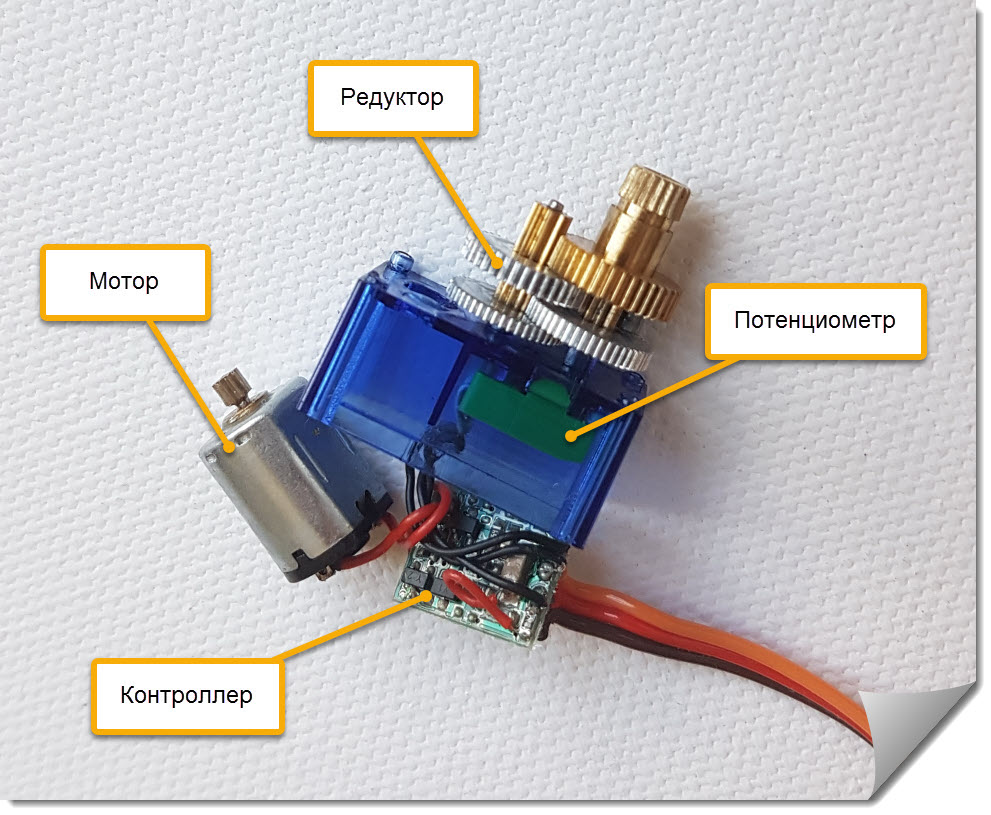
- Потенциометр: Устанавливается для обратной связи и контроля положения вала. Вращение вала передается на ось потенциометра, что позволяет контроллеру отслеживать текущее состояние.
- Контроллер: Этот элемент использует данные от потенциометра для поддержания заданного положения вала, регулируя работу мотора. Если вал принудительно поворачивается, контроллер активирует мотор для корректировки положения.
Контроллер нужен для любых типов сервоприводов, он интерпретирует управляющие сигналы и анализирует данные от потенциометра или энкодера.
Цифровые и аналоговые сервоприводы
Сервоприводы можно подразделить на аналоговые и цифровые. В аналоговых моделях используется традиционная электронная схема, тогда как цифровые сервоприводы оснащены микроконтроллером, который обеспечивает более высокую точность и быструю реакцию на управляющий сигнал. Несмотря на более высокую стоимость, цифровые модели предпочтительнее для таких приложений, как манипуляторы и роботы.
Интерфейсы управления
Управление сервоприводами чаще всего происходит с помощью широтно-импульсной модуляции (ШИМ), где длина импульса определяет позицию вала или скорость вращения. Кроме того, существуют модели с контроллерами, которые поддерживают управление через интерфейсы I2C, UART, USB, CAN и EtherCAT. При необходимости можно использовать конвертеры для преобразования сигналов и управления сервоприводами через альтернативные протоколы.
Использована информация:
")
")
")