
Двигатель является источником движения БПЛА. БПЛА меняет свое состояние полета, изменяя скорость вращения двигателя, благодаря чему дрон может зависать, подниматься или опускаться в полёте. В этой статье мы рассмотрим основы промышленных двигателей для беспилотников и расскажем, как правильно выбрать двигатель.
Определение двигателя дрона
Определение: Электродвигатель дрона преобразует электрическую энергию в механическую. Двигатель состоит из статора, ротора, железного сердечника и основной части магнита. Двигатели делятся на щеточные (brushed) и бесщеточные (brushless). Двигатель БПЛА в основном является бесщеточным. Один его конец закреплен на основании двигателя на кронштейне рамы, а другой соединен с пропеллером, который создает тягу за счет вращения.

Какие типы двигателей используются в беспилотниках?
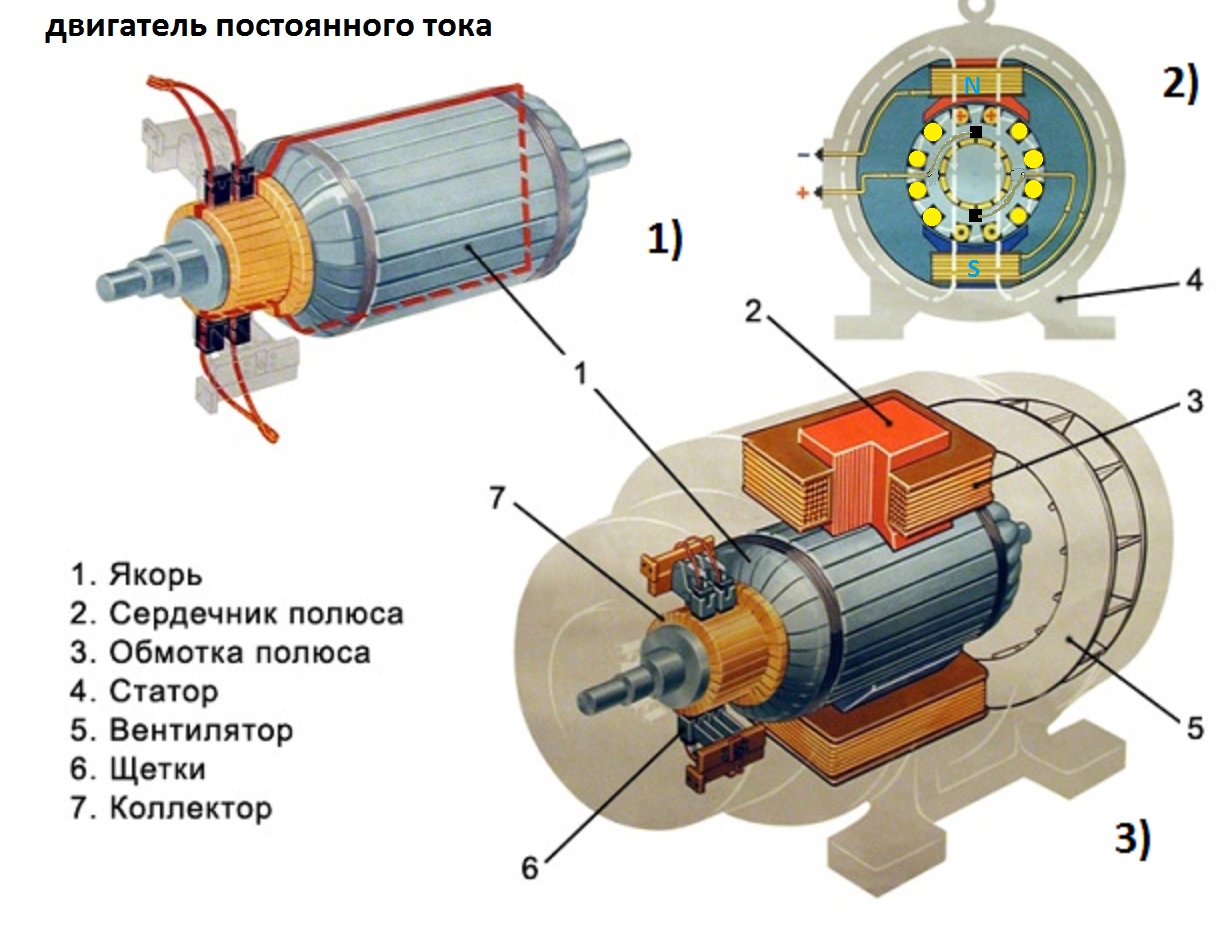
Существует два основных типа двигателей для беспилотников. Один из них - бесколлекторный щеточный (coreless brushed) двигатель постоянного тока, который чаще всего используется в небольших игрушечных самолетах; другой - бесщеточный (brushless) двигатель постоянного тока, который чаще всего выпускается с внешним ротором. Двигатели с низким энергопотреблением, низким уровнем шума, сверхдолгим сроком службы и высокой надежностью широко используются в индустрии беспилотников.
Коллекторные двигатели (brushed, щеточные) дешевле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны.
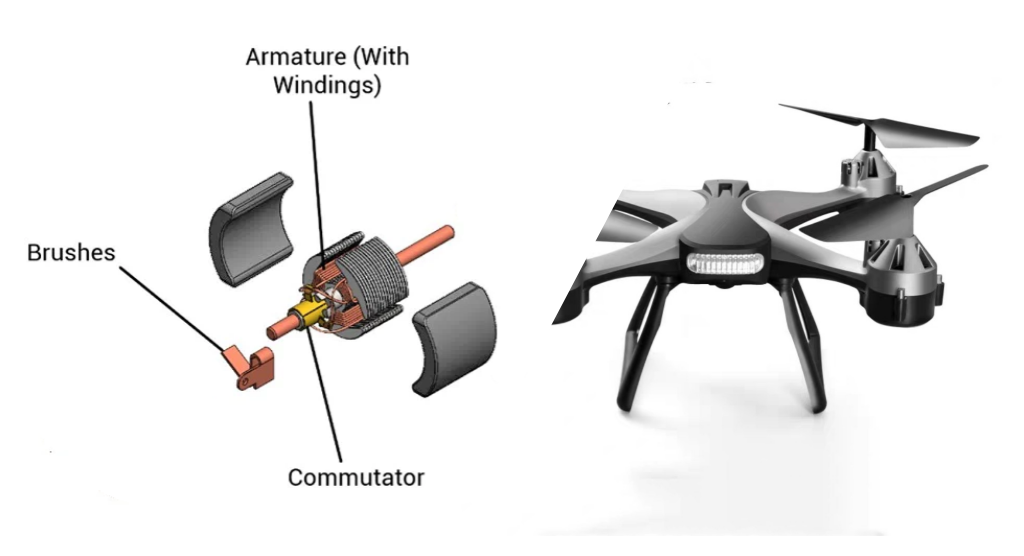
Основная структура щеточного двигателя - это щетки (Brushes) + коллектор/коммутатор (Commutator) + якорь/ротор с обмотками(аrmature with windings) + корпус (статор). Благодаря отсутствию железного сердечника (iron core), потери в нем отсутствуют, поэтому его называют «двигателем без сердечника (coreless motor)». Вращающий момент создается за счет вращающегося магнитного поля, тем самым выделяя кинетическую энергию. Бессердечниковые двигатели имеют высокий КПД. Но из-за перегрева при высоких условиях эксплуатации и механических характеристик их размер не может быть большим.
Бесколлекторные двигатели (brushless, бесщёточные) – дороже, но способны развить большую скорость, а также более износостойкие. Модель ездит и быстрее, и дольше.
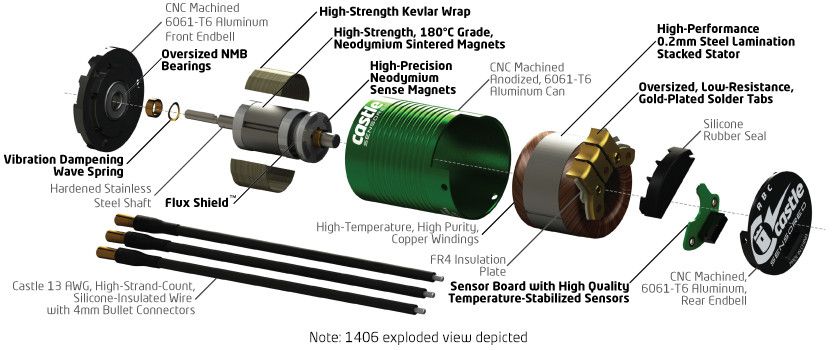
В бесщеточных двигателях работа по коммутации выполняется тремя фазами переменного тока, что приводит к изменению направления тока и магнитных полей, отталкиванию и притяжению между ротором и связанными с ним постоянными магнитами, вызывая вращение.
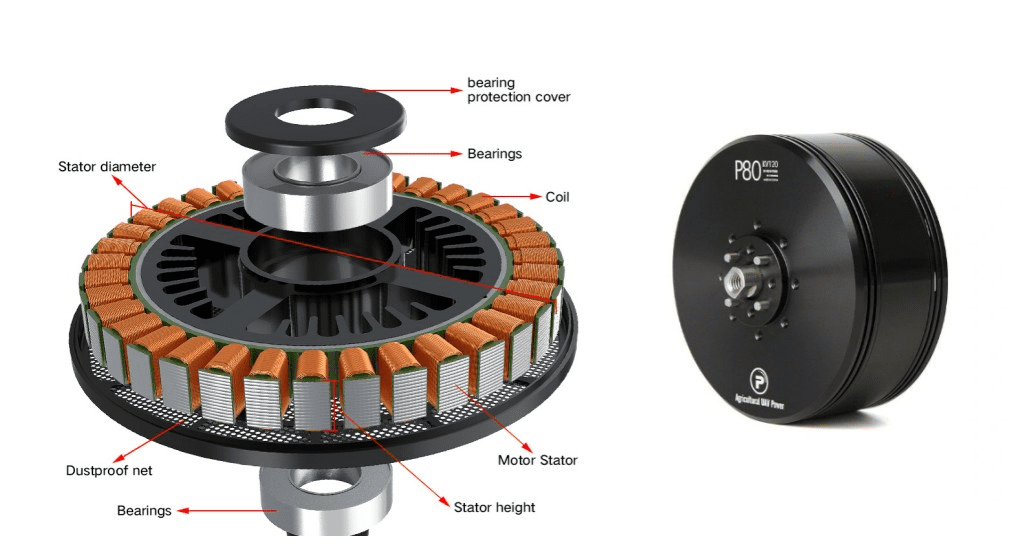
Статор бесщеточного двигателя - это часть, которая генерирует вращающееся магнитное поле, способное поддерживать ротор во вращении. В основном он состоит из листов кремниевой стали, эмалированных проводов, подшипников и опор. Ротор изготовлен из магнитов NdFeB и других материалов). , которые вращаются под действием вращающегося магнитного поля статора. Компоненты состоят в основном из вращающегося вала и магнита.
Его преимуществами являются высокая эффективность, низкое энергопотребление, низкий уровень шума, сверхдолгий срок службы, высокая надежность, регулирование скорости преобразования частоты и др.
бесщеточный двигатель
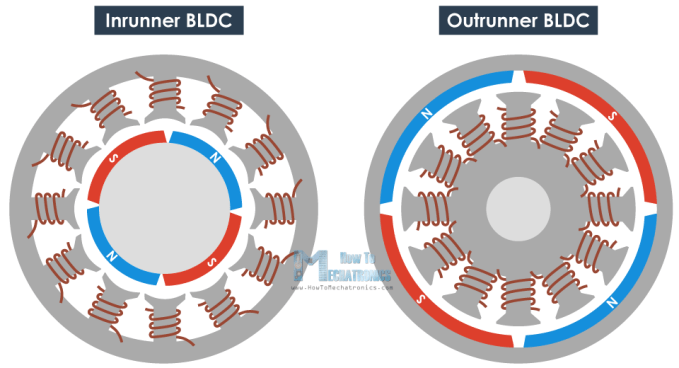
Сами бесколлекторные моторы делятся на еще несколько видов. Первый параметр — расположение ротора.
Inrunner — именно этот тип используется в машинках. Движущая часть находится внутри.
Outrunner — крутится сам корпус мотора. Такие чаще всего используются в квадрокоптерах.
Как выбрать двигатель для дрона?
Выбор двигателя зависит от конкретных требований к дрону и желаемых эксплуатационных характеристик. Важно учитывать эти факторы при выборе двигателя, чтобы гарантировать, что дрон будет работать так, как нужно
1.Тяга двигателя
Первое, что необходимо учитывать при выборе двигателя, - это его требуемая тяга. Как рассчитать тягу двигателя дрона, смотрите в следующей формуле: тяга на двигатель = MTOW (максимальный взлетный вес)/количество двигателей.
Разобраться в этой формуле несложно, если понимать два необходимых условия расчета, которые фигурируют в формуле: MTOW (максимальный взлетный вес) и количество двигателей.
тяга октокоптера 8 моторов
MTOW означает максимальный взлетный вес дрона, максимальный взлетный вес должен включать в себя
Вес дрона: включает в себя вес рамы дрона, моторов, пропеллеров, ESC (электронный регулятор скорости), батарей, шасси и т.д.
Вес оборудования: любое дополнительное оборудование, такое как камеры, GPS и FC (управление полетом).
Вес полезной нагрузки: Любой груз должен быть принят во внимание.
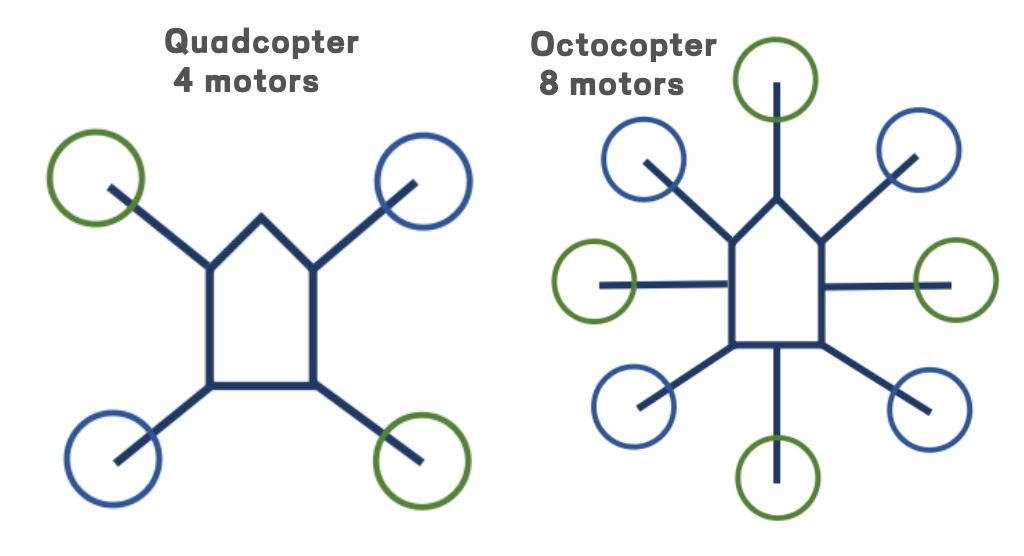
Количество двигателей: вы можете понять, из скольких двигателей состоит дрон. Например, квадрокоптер имеет 4 мотора, октокоптер - 8 моторов. Количество
Количество осей у дрона разное, и количество моторов тоже разное.
Возьмем для примера октокоптер. Предположим, что MTOW составляет 20 кг. Тогда тяга, необходимая для каждого двигателя, составит 2,5 кг (20 кг/8).
Зная тягу, требуемую для каждого мотора, вы увидите эти два значения, отмеченные в инструкции к мотору: Максимальная тяга двигателя и Рекомендуемая тяга. Это может быть понятно. По определению, максимальная тяга двигателя представляет собой максимальную тягу, которую может обеспечить двигатель. Рекомендуемая тяга - это тяга, которую мы обычно рекомендуем для работы.
Дрон должен не только подниматься и приземляться, но и двигаться вперед или назад, крениться влево или вправо. Необходимо оставить двигателю достаточный запас
мощности для преодоления сопротивления и аварийных ситуаций во время полета, чтобы быть уверенным в безопасности.

2. Конструкция мотора
При поиске моторов вы обнаружите, что даже моторы с одинаковым уровнем тяги имеют разный внешний вид. Одни из них закрытые, а другие - открытые.
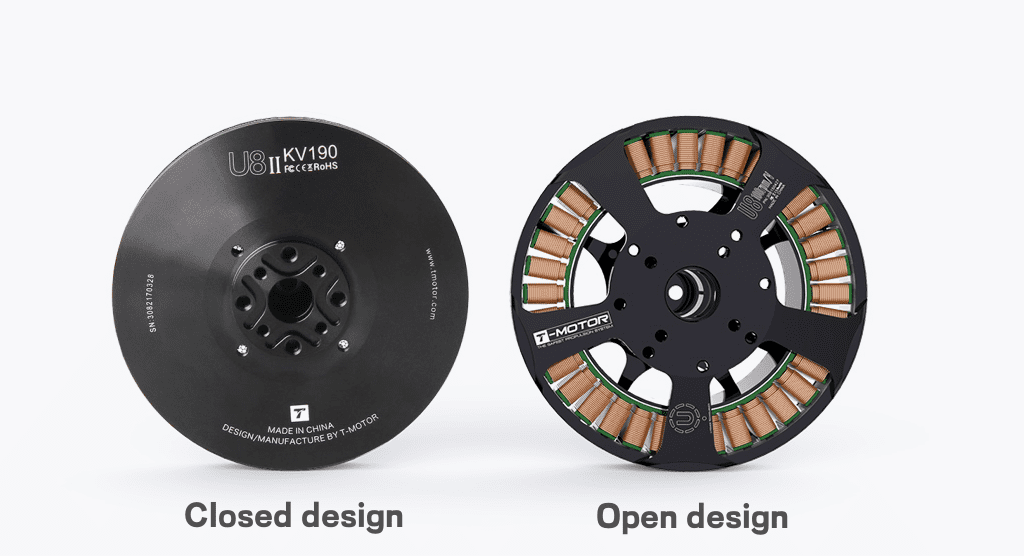
Закрытая конструкция эффективно предотвращает попадание в двигатель песка, воды и других посторонних предметов. Если среда эксплуатации дрона пыльная или неизбежен контакт с водой, как, например, у сельскохозяйственных дронов, стоит обратить внимание на моторы закрытой конструкции.
Двигатель открытой конструкции предназначен специально для дронов, которым требуется длительный срок службы. Его уникальная структура благоприятно влияет на теплоотдачу мотора и обеспечивает эффективное вращение при длительной эксплуатации.
3.Убедитесь, что диапазон размеров пропеллеров, совместимых с моторами, соответствует колесной базе дрона.
Колесная база (wheelbase) рамы дрона - это расстояние между центральными отверстиями симметричных двухосевых двигателей. Размер колесной базы определяет верхний предел размера пропеллера. И диапазон размеров пропеллера, с которым может сочетаться мотор, обычно фиксирован.
Представьте четыре двигателя на рисунке ниже как ABCD. Колесная база - это расстояние от точки A до точки D. Тогда можно получить расстояние от точки A до точки C. Это размер лопастей пропеллера, который можно установить.
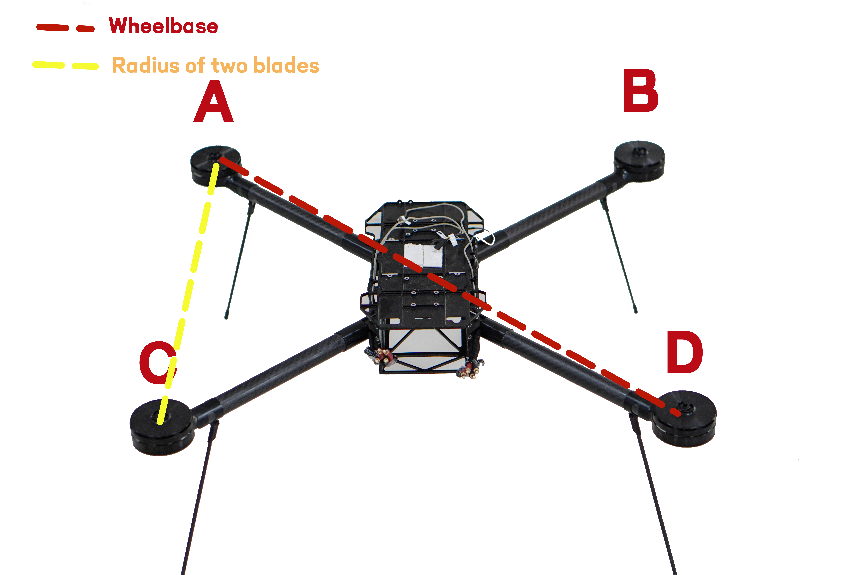
Диапазон размеров пропеллеров для каждого мотора фиксирован для конкретного дрона. Выбирая подходящий мотор, вы должны убедиться, что максимальный диапазон лопастей, применимый к данному мотору, не превышает допустимого. В противном случае лопасти пропеллера будут конфликтовать.
Как поддерживать моторы дронов в рабочем состоянии
Мотор дрона, как довольно сложное электронно-механическое устройство, является ключом к поддержанию баланса дрона. Придерживайтесь привычки обслуживать моторы дронов, используя приведенные ниже советы.

1. Убедитесь, что рабочая среда дрона находится в допустимом диапазоне температур.
В зависимости от марки мотора, рабочая температура может быть разной. Возьмем для примера мотор T-Motor. Обычная рабочая температура мотора составляет -20℃~65℃. Убедитесь, что ваш двигатель начинает работать при подходящей температуре.
2. Избегайте попадания воды внутрь двигателя и держите внутреннюю часть сухой.
Если на двигателе указано, что он не является водонепроницаемым, попадание воды может вызвать ржавчину подшипников, ускорить их износ и сократить срок службы бесщеточного двигателя. Кроме того, существует вероятность появления ржавчины на деталях, таких как листы кремниевой стали, валы и корпуса двигателя, если внутрь попадет вода.
3. Регулярно проверяйте подшипник двигателя
Метод проверки подшипника двигателя заключается в том, чтобы снять гребной винт и приводной двигатель и посмотреть, как он звучит. При нормальном вращении шум отсутствует, а звук сильный. Если звук шумный, и внутри есть шумы, как будто там песок, возможно, подшипник поврежден и нуждается в замене.
4.Использование коврика
При взлете дрона рекомендуется использовать толстый коврик на земле, если вокруг пыльно. Из-за сильного ветра во время взлета некоторые мелкие частицы песка могут легко закрутиться. Использование толстого коврика на земле во время взлета дрона может эффективно предотвратить втягивание посторонних предметов ветром в двигатель.
5. Не забывайте проверять двигатель на износ перед каждым использованием.
Например, иногда в него попадают мелкие камни, из-за которых мотор может заклинить после работы. Перед каждым использованием можно продуть его воздухом или купить баллончик со сжатым воздухом, чтобы распылить его.
6. Проверка нормальной работы
Если мотор не вращается или издает ненормальный шум при включении, его следует немедленно выключить.
Как определить, что мотор дрона неисправен?
Обратите внимание на следующие ситуации:
1. Внешняя структура мотора повреждена.
2. Для большинства мультироторных двигателей, если зазор осевого перемещения превышает 0,5, пожалуйста, замените двигатель. (Метод определения: измерьте расстояние от стального кольца до задней крышки).
3. Внутреннее сопротивление двигателя ненормально.
4. Двигатель полностью прекращает работу/не вращается.
5. Двигатель ненормально трясется или замирает, медленно реагирует.
6. Обмотка сгорела или сломалась, наблюдается ненормальный шум.
Источники:
- https://www.t-drones.com/blog/what-motors-are-used-in-drones.html
- https://habr.com/ru/articles/469733/
Дополнительная информация:
- RC Машинки: Введение
- RC Машинки: Первые покупки — шасси и силовая установка
- От земли к FPV Квадрокоптеру: Введение
- FPV Квадрокоптер: Фильтрация в Betaflight
- От земли к FPV Квадрокоптеру: Собираем свой первый квадрокоптер (Whoop)


 v2")
")