Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.



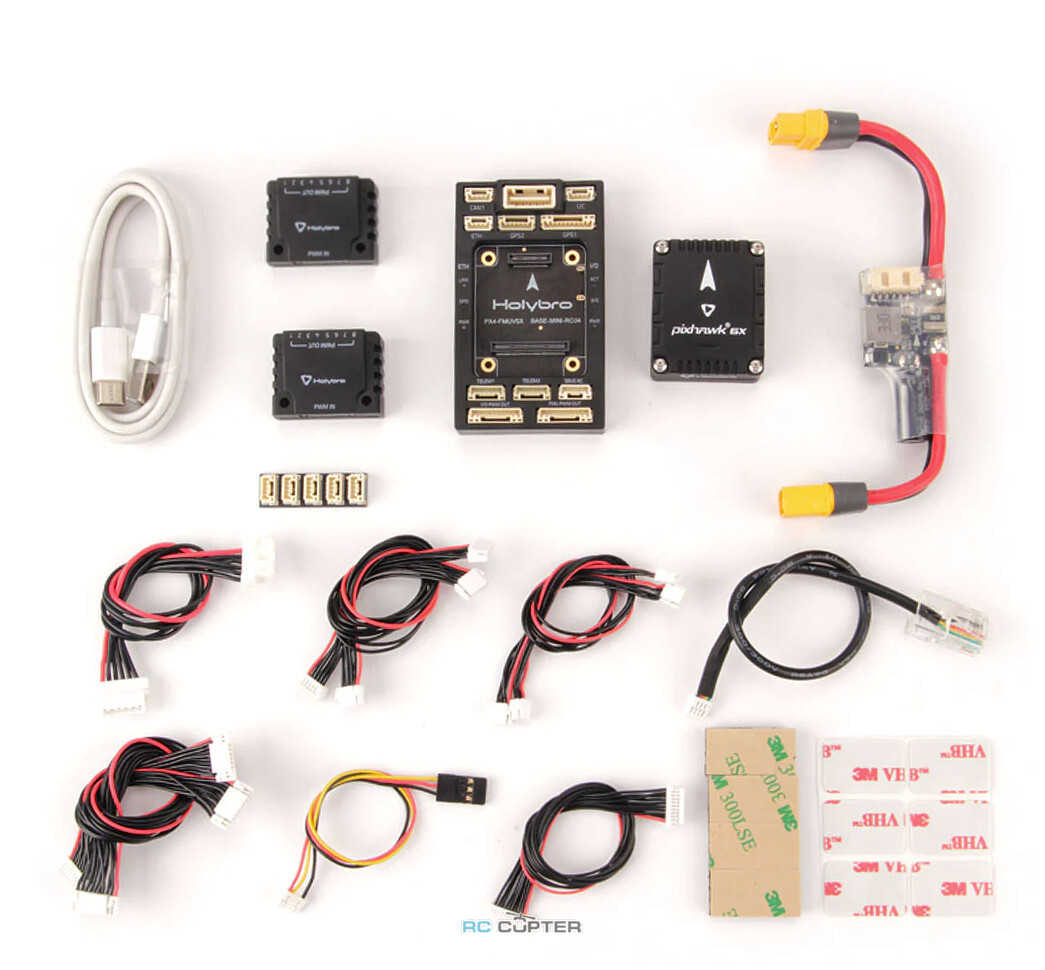
Полётный контроллер Holybro Pixhawk 6X (Rev 3) + mini base + PM02D
под заказ, пишите
- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
Внимание! Это устаревшая версия.
Полётный контроллер Holybro Pixhawk 6X (Rev 3) + mini base + PM02D
Эта страница предназначена для версий REV 3 и 4. Для получения информации о последней версии (REV 8) перейдите на эту страницу или в раздел аналогичные товары внизу страницы. Версия REV 8 оснащена датчиками 3x IMU ICM-45686 с технологией BalancedGyro™.
Актуальная модель: Полётный контроллер Holybro Pixhawk 6X (ICM-45686, Rev v.8) + standard base + PM02D
Pixhawk® 6X - это последнее обновление успешного семейства полетных контроллеров Pixhawk®, основанных на открытом стандарте Pixhawk® FMUv6X и стандарте шины автопилота Pixhawk®. Он поставляется с предустановленным автопилотом PX4 Autopilot®. Внутри Pixhawk® 6X находится STM32H753 на базе STMicroelectronics®, в паре с сенсорной технологией от Bosch®, InvenSense®, что обеспечивает гибкость и надежность для управления любым автономным транспортным средством, подходящим как для академических, так и для коммерческих приложений.
Микроконтроллер H7 Pixhawk® 6X содержит ядро Arm® Cortex®-M7, работающее на частоте до 480 МГц, имеет 2 Мб флэш-памяти и 1 Мб оперативной памяти. Благодаря обновленной вычислительной мощности разработчики могут более продуктивно и эффективно выполнять свои разработки, позволяя создавать сложные алгоритмы и модели.
Открытый стандарт FMUv6X включает высокопроизводительные, малошумные IMU на борту, предназначенные для лучшей стабилизации. IMU с тройным резервированием и барометр с двойным резервированием на отдельных шинах. Когда автопилот PX4 обнаруживает отказ датчика, система плавно переключается на другой для поддержания надежности управления полетом. Независимый LDO питает каждый набор датчиков с независимым управлением питанием. Система виброизоляции для фильтрации высокочастотной вибрации и снижения уровня шума обеспечивает точность показаний, позволяя транспортным средствам достигать лучших общих летных характеристик. Внешняя шина датчиков (SPI5) имеет две линии выбора чипа и сигналы готовности данных для подключения дополнительных датчиков и полезной нагрузки с SPI-интерфейсом, а благодаря встроенному Microchip Ethernet PHY теперь возможна высокоскоростная связь с компьютерами миссии по сети Ethernet.
Pixhawk® 6X идеально подходит для разработчиков в корпоративных исследовательских лабораториях, стартапах, академических кругах (исследователи, профессора, студенты) и для коммерческого применения. Holybro предлагает базовую плату Pixhawk Baseboard и мини-плату Pixhawk Mini-Baseboard, каждая из которых отличается форм-фактором и интерфейсами.
Высокопроизводительный процессор STM32H753 с тактовой частотой до 480 МГц
Модульный полетный контроллер: разделенные IMU, FMU и базовая система, соединенные 100-контактным и 50-контактным разъемом шины автопилота Pixhawk®.
Избыточность: 3 датчика IMU и 2 датчика барометра на отдельных шинах.
Домены с тройным резервированием: Полностью изолированные домены датчиков с отдельными шинами и отдельным управлением питанием
Новая система виброизоляции для фильтрации высокочастотной вибрации и снижения шума для обеспечения точности показаний
Интерфейс Ethernet для высокоскоростной интеграции с компьютером миссии
Температура IMU контролируется встроенными нагревательными резисторами, что позволяет обеспечить оптимальную рабочую температуру IMU.
Примечание: Для работы данного изделия требуется модуль FC + базовая плата. Модуль FC или базовая плата сами по себе не будут работать.
-
Pixhawk 6X Flight Controller Module
-
Pixhawk Mini Base
-
PM02D Power Module
-
Cable Set
Для получения технической информации посетите сайт.
Последняя информация о поддерживаемых прошивках.
Пример схемы подключения электроники на базе полётного контроллера Holybro Pixhawk 6
Статьи по теме:
| Производитель: | Holybro |
")
 цифровой для Pixhawk")

 цифровой для Pixhawk 5X/6X")

 цифровой для Pixhawk 5X/6X")

")

")
 для Pixhawk")

 + standard base + PM02D")

 + standard base v2a + PM02D")
 PM02D + UBEC без кейса")

 + standard base + PM02D")





 (FC module)")
 + mini base + PM02D")
