Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
 + mini base + PM02D")
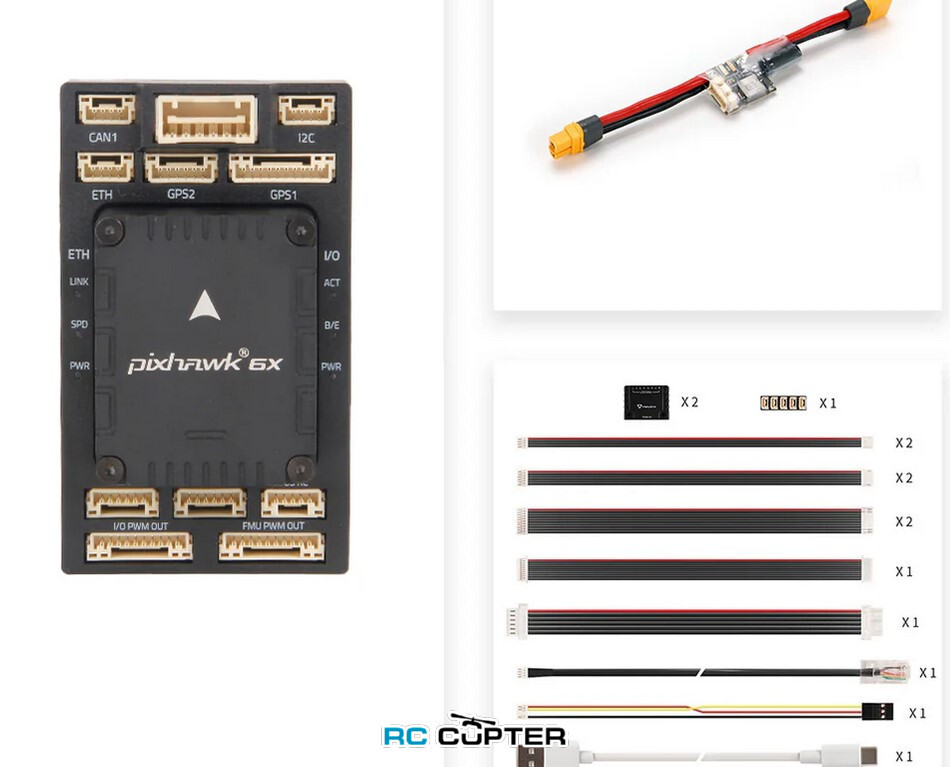
Полётный контроллер Holybro Pixhawk 6X (ICM-45686, Rev v.8) + mini base + PM02D
под заказ, пишите
- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
Autopilot Flight Controllers - Pixhawk 6X (ICM-45686)
Pixhawk Baseboard Version - Mini
GPS - no
Power Module - PM02D
SKU - 20293
Примечание: Сейчас поставляется Pixhawk 6X REV 8, он оснащен 3x IMU ICM-45686 с технологией BalancedGyro™.
Стандартная базовая плата была обновлена до версии 2. Более подробная информация приведена в List of Changes Between V1 and V2
Ключевые моменты проекта
- Резервирование: 3x ICM-45686 IMU датчики (±32g) с технологией BalancedGyro™ и 2x барометра
- Высокопроизводительный процессор STM32H753 с тактовой частотой до 480 МГц
- Модульный полетный контроллер: раздельные IMU, FMU и базовая система, соединенные 100-контактным и 50-контактным разъемом шины автопилота Pixhawk®.
- Области с тройным резервированием: Полностью изолированные области датчиков с отдельными шинами и отдельным управлением питанием
- Новый современный прочный виброизоляционный материал с резонансной частотой в верхнем диапазоне частот.
- Интерфейс Ethernet для высокоскоростной интеграции бортового компьютера. Бестрансформаторный интерфейс может быть реализован с помощью оконечных резисторов 50 Ом на целевом устройстве (AN2190 50 Ohm termination).
- Плата IMU с температурным контролем, обеспечивающая оптимальную рабочую температуру IMU.
- Аппаратное переключение режима сигнала 3,3 В или 5 В (требуется модификация базовой платы)
Новая конструкция виброизоляции
В новой конструкции виброизоляции вместо традиционного пенопласта используется тот же специально разработанный прочный изоляционный материал, что и в Pixhawk 6X Pro. Благодаря обширным исследованиям и испытаниям extensive R&D and testing, она обеспечивает оптимальные характеристики демпфирования IMU с резонансной частотой в более высоком спектре, что идеально подходит для промышленных и коммерческих дронов.







Примечание:
- Версия Rev 8 поддерживается в PX4 1.14.3 или более поздней версии, а также в Ardupilot 4.5.0 или более поздней стабильной версии. По умолчанию она поставляется с прошивкой PX4. Пользователь также может использовать прошивку Ardupilot, прошив ее через Mission Planner или QGroundControl.
Технические характеристики
Процессоры и датчики
- FMU Processor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- On-board sensors (текущая ревизия, Rev8)
- Accel/Gyro: 3x ICM-45686 (with BalancedGyro™ Technology)
- Barometer: ICP20100 & BMP388
- Mag: BMM150
- On-board sensors (предыдущая ревизия, Rev 3/4)
- Accel/Gyro: BMI088/ICM-20649
- Accel/Gyro: ICM-42688-P
- Accel/Gyro: ICM-42670-P
- Mag: BMM150
- Barometer: 2x BMP388
- NXP EdgeLock SE050 Plug & Trust аппаратный защищенный элемент
Электротехнические данные
- Номинальные значения напряжения:
- Максимальное входное напряжение: 6 В
- USB входное напряжение: 4.75-5.25 В
- Вход сервопривода: 0~36V
- Номинальный ток:
- Telem1 Ограничитель выходного тока: 1.5A
- Ограничитель выходного тока всех остальных портов: 1.5A
- PWM Signal (ШИМ-сигнала) Напряжение :
- По умолчанию 3,3 В (регулируется до 5 В с помощью резистора на плате).
Механические данные
- Размеры
- Модуль полетного контроллера: 38.8 x 31.8 x 16.8mm
- Стандартная плата: 52.4 x 102 x 16.7mm (алюминий)
- Мини плата: 43.4 x 72.8 x 14.2 mm
- Вес
- Flight Controller Module: 31.3g
- Модуль полетного контроллера: 72.5g (алюминий)
- Мини плата: 26.5g
Справочные ссылки
- Полная спецификация
- Pixhawk порты плат
- Руководство по настройке модуля питания
- Размеры
- Загрузки
- Образец схемы подключения
- Последняя информация о поддерживаемых прошивках Supported Firmware.
- Для получения другой технической информации посетите сайт https://docs.holybro.com/.
Если вы ищете полетный контроллер, аналогичный Cubepilot Orange+ mini Carrier board, можете обратить внимание на полетный контроллер Pixhawk 6X mini base
SKU 11073 includes:
- Pixhawk 6X Flight Controller Module
SKU 20293/SKU 20300/SKU20313 includes:
- Pixhawk 6X Flight Controller Module
- Standard Baseboard v2A/v2B or Mini Baseboard
- PM02D HV Power Module
- Cable Set
- Pixhawk 6X Flight Controller Module
- Standard Baseboard v2A/v2B or Mini Baseboard
- PM02D HV Power Module
- Cable Set
- M9N/M10 GPS
Аксессуары:


| Линейка: | Pixhawk 6X |
| Производитель: | Holybro |

 + mini base + PM02D")
 + standard base + PM02D")
 + standard base + PM02D")
 (FC module)")
")

 (SKU 11088)")


")