Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.
 Matek CAN NODE CAN-G474 AP_PERIPH (CAN; UART+I2C+PWM)")
 Matek CAN NODE CAN-G474 AP_PERIPH (CAN; UART+I2C+PWM)")
Хаб (Конвертер) Matek CAN NODE CAN-G474 AP_PERIPH (CAN; UART+I2C+PWM)
под заказ, пишите
- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
AP_Periph CAN узел CAN-G474, DroneCAN, G474, FDCAN
CAN-G474 - это адаптерный узел на базе прошивки ArudPilot AP_Periph.
Благодаря CAN-трансиверу 5 Мбит/с и микроконтроллеру STM32G474, CAN-G474 способен работать в режиме CANFD.
С помощью этой платы вы можете легко использовать библиотеку драйверов ArduPilot для преобразования поддерживаемых ArduPilot GNSS, компаса, барометра, датчика воздушной скорости, дальномера (Rangefinder), датчика приближения (Proximity sensor), электронных топливных инжекторов (Electronic Fuel Injectors - EFI) и периферийных устройств на базе GPIO (ШИМ (PWM), светодиодное оповещение) в периферийные устройства шины DroneCAN.
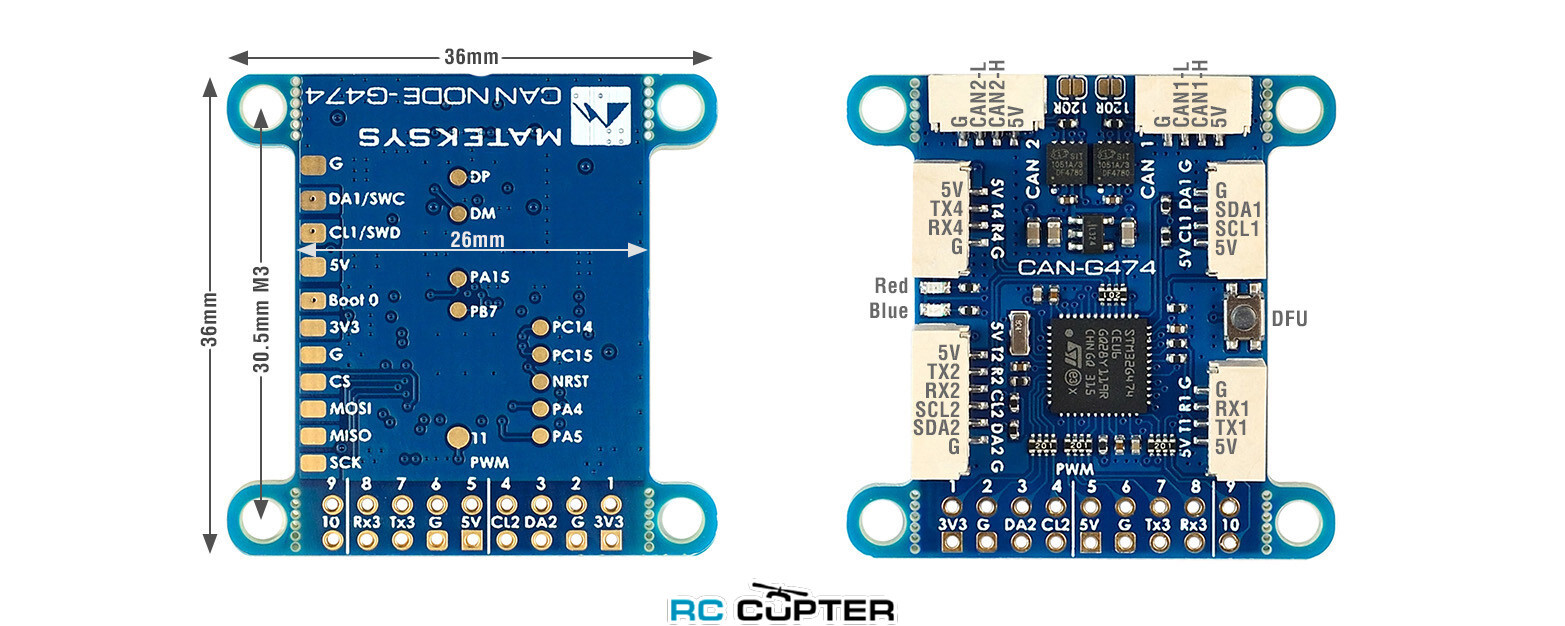
Технические характеристики
- MCU: STM32G474CE, 512 КБ флэш-памяти
- Скорость передачи данных CAN-трансивера до 5 Мбит/с
- 2х CAN шина
- 4x UART
- для периферийных датчиков GNSS, дальномера, приближения, EFI, RC вход (приемник)
- поддержка датчиков GNSS, компаса, барометра по протоколу MSP. По умолчанию MSP включен на TX3. - 2x шина I2C
- для периферийных I2C датчиков воздушной скорости, барометра, компаса - 1х SPI
- для периферийного устройства RM3100 (компас)
- Пады SPI для RM3100 находятся на нижней стороне, с шелкографией «CS, MOSI, MISO, SCK». - 11x выходов ШИМ
- для сервоприводов и ESC, все ШИМы (PWM) поддерживают DMA/DShot
- PWM1-10 на отверстиях DuPont 2,54 мм
- Площадка PWM11 находится на нижней стороне, с шелкографией «11» - ST отладка, SWC и SWD (на нижней стороне)
- UART1 (TX1,RX1) поддерживает обновление прошивки в режиме DFU
- СВЕТОДИОД
- Синий, быстрое мигание, загрузка
- Синий, медленное мигание, связь с контроллером полета
- Красный, индикатор 3,3 В - Диапазон входного напряжения: 4.5~5.5V @5V pad/pin
- Потребляемая мощность: 62 мА
- Рабочие температуры: -30~85 °C
- 5x JST-GH-4P(SM04B-GHS-TB) для CAN1, CAN2, I2C1, UART1 и UART4
- 1x JST-GH-6P(SM06B-GHS-TB) для UART3+I2C2
- 18 отверстий DuPont 2,54 мм
- Размер платы: 36мм*36мм*6мм. 5.2g,
- Крепление: 30.5мм 4x Dia.3мм
- 3D файл: CAN-G474_STEP.zip
DroneCAN периферия (MatekG474-Periph)

DroneCAN на PWM (MatekG474-DShot)

Комплектация
- 1x CAN-G474 плата
- 2x JST-GH-4P к JST-GH-4P 20 см силиконовый провод
- 1x JST-GH-6P к JST-GH-6P 20 см кремниевый провод
Прошивка
- ArduPilot AP_Periph MatekG474-Periph для периферийных датчиков
- ArduPilot AP_Periph MatekG474-DShot для вывода DroneCAN-PWM
- Обновление через DroneCAN GUI Tool или Mission Planner-DroneCAN Tab, загрузите «AP_Periph.bin»
- Обновление через STM32CubeProgrammer в режиме DFU, подключите модуль USB-TTL к UART1, подключите USB, удерживая кнопку DFU, загрузите «AP_Periph_with_bl.hex».
Примечание
- Необходимо подключить либо одну CAN-шину к бортовому контроллеру, либо обе к FC для резервирования.
- SWC/SWD разделяют выводы MCU с SDA1/SCL1.
- Другие контакты MCU, которые не указаны, пока бесполезны.
- CAN-G474 поддерживает 1Mbit ~ 5Mbit CAN/CANFD, CAN-L431 работает с 1Mbit CAN.
CAN node параметры
| AP_Periph fw MatekG474-Periph | |||||
| CAN | CAN1-H / CAN1-L | CAN1 | CAN1_PROTOCOL | 1 | |
| CAN2-H / CAN2-L | CAN2 | CAN2_PROTOCOL | 1 | ||
| UART | TX1 / RX1 | USART1 DMA | Serial PORT 1 | RC_PORT | 1 |
| TX2 / RX2 | USART2 DMA | Serial PORT 2 | GPS_PORT | 2 | |
| TX3 / RX3 | USART3 NODMA | Serial PORT 3 | MSP_PORT | 3 | |
| TX4 / RX4 | UART4 DMA | Serial PORT 4 | RNGFND_PORT | 4 | |
| PRX_PORT | -1 | ||||
| EFI_PORT | -1 | ||||
| I2C | CL1 / DA1 CL2 / DA2 |
I2C1 I2C2 |
BUS0 BUS1 |
BATT_MONITOR BATT_I2C_BUS |
21 0 |
| ARSPD_TYPE | 0 (none) 1 (MS4525) 9 (I2C-DLVR-10) |
||||
| COMPASS_ENABLE COMPASS_DISBLMSK |
1 0 |
||||
| SPI | CS /MOSI /MISO /SCK | RM3100 | |||
| Disable GPS | GPS_PORT | -1 | |||
| Disable compass | COMPASS_ENABLE | 0 | |||
| Disable Battery monitor | BATT_MONITOR | 0 | |||
| Disable MSP | MSP_PORT | -1 | |||
| * | * | * | * | * | * |
| AP_Periph fw MatekG474-Dshot | |||||
| PWM | 1 | Group 1 | TIM2_CH1 | OUT1_FUNCTION | 33 |
| 2 | TIM2_CH2 | OUT2_FUNCTION | 34 | ||
| 3 | TIM2_CH3 | OUT3_FUNCTION | 35 | ||
| 4 | TIM2_CH4 | OUT4_FUNCTION | 36 | ||
| 5 | Group 2 | TIM3_CH1 | OUT5_FUNCTION | 51 | |
| 6 | TIM3_CH2 | OUT6_FUNCTION | 52 | ||
| 7 | TIM3_CH3 | OUT7_FUNCTION | 53 | ||
| 8 | TIM3_CH4 | OUT8_FUNCTION | 54 | ||
| 9 | Group 3 | TIM8_CH1 | OUT9_FUNCTION | 55 | |
| 10 | TIM8_CH2 | OUT10_FUNCTION | 56 | ||
| 11 | Group 4 | TIM5_CH1 | OUT11_FUNCTION | 57 | |
| ESC_TELEM_PORT | 3 | ||||
| ESC_PWM_TYPE | 7 | ||||
| OUT_BLH_OTYPE | 6 | ||||
| OUT_BLH_MAS | 15 | ||||
Параметры полетного контроллера для датчиков
CAN_D*_PROTOCOL = 1
CAN_P*_DRIVER = 1
GPS*_TYPE = 9 DroneCAN
COMPASS_TYPEMASK = 0 (DroneCAN Unchecked)
ARSPD*_TYPE = 8 (DroneCAN)
BATT*_MONITOR = 8 (DroneCAN)
RNGFND*_TYPE = 24 (DroneCAN)
EFI*_TYPE = 5 (DroneCAN)
PRX*_TYPE = 14 (DroneCAN)
Параметры полетного контроллера для ШИМ (PWM)
CAN_D*_PROTOCOL = 1
CAN_P*_DRIVER = 1
CAN_D*_UC_ESC_OF = 4 (Plane 4.2.1 или новее)
CAN_D*_UC_ESC_BM = x
CAN_D*_UC_SRV_BM = x
BRD_SAFETYENABLE = 0 (если ваш полетный контроллер не имеет штырька безопасности)
Инструкция: Использование адаптеров MatekL431 для ШИМ и DShot
| Вес: | 5 г |
| Производитель: | Matek |
| Протокол связи в микроконтроллерах и периферии: | CAN , DroneCAN , I2C , PWM , SPI , UART |
| Рабочее напряжение: | 4.5-5.5 В |
| Разъём: | JST-GH 4 pin , JST-GH 6 pin |
| Ток: | 62 мА |










 Matek AP_PERIPH CAN-L431 (CAN, UART, PWM, I2C, SPI в DroneCAN)")
, (CAN Hub и PDB)")