Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.

- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
Модель снята с производства, похожие GPS в разделе аналогичные товары в конце странице
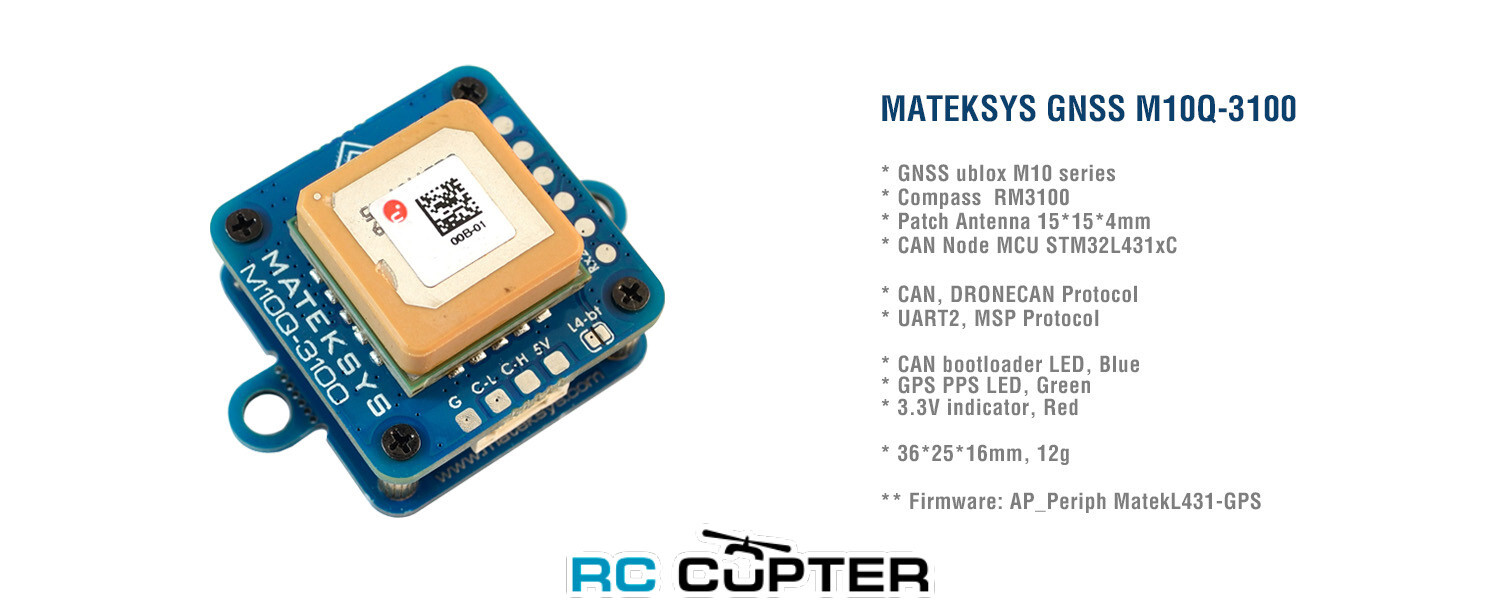
AP_Periph L431 CAN node, SAM-M10Q, RM3100, протокол DroneCAN и UART_MSP
- M10Q-3100 основан на прошивке AP_Periph от ArudPilots и представляет собой периферийное устройство GNSS+COMPASS с интерфейсами CAN/DroneCAN и UART/MSP.
- M10Q-3100 использует многоконсольную ГНСС на базе u-blox серии M10, это одновременный ГНСС-приемник, который может принимать и отслеживать несколько ГНСС-систем. Благодаря многодиапазонной архитектуре ВЧ-фронта все четыре основных группировки ГНСС, GPS, Galileo, ГЛОНАСС и BeiDou, могут приниматься одновременно. Патч-антенна с высоким коэффициентом усиления размером 15 x 15 мм2 обеспечивает оптимальный баланс между производительностью и небольшими размерами. Всенаправленная диаграмма направленности излучения антенны повышает гибкость при установке устройства.
- В M10Q-3100 встроен компас промышленного класса PNI RM3100, который обеспечивает высокое разрешение, низкое энергопотребление, отсутствие гистерезиса, большой динамический диапазон и высокую частоту дискретизации.
Технические характеристики
- GNSS серии M10 (GPS, ГЛОНАСС, Galileo и BeiDou)
- Магнитный компас PNI RM3100
- Накладная GNSS-антенна 15*15*4 мм
- CAN-узел MCU STM32L431xC
- Интерфейс
CAN(C-H, C-L), протокол DroneCAN
UART2((TX2), выход MSP
Отладка ST, SWCLK и SWDIO - Светодиод загрузчика CAN, синий
Быстрое мигание, загрузка
Медленно мигает, работает - Светодиод GNSS PPS, зеленый
горит постоянно после включения питания
мигает (1 Гц), когда GNSS зафиксирована 3D - Светодиод 3,3 В, красный
- Питание для платы M10Q-3100: 4,5~5,3 В @5 В колодка/контакт
- Потребляемая мощность: 50 мА
- Рабочие температуры: -20~85 °C
- Размер платы: 36мм*15мм*16мм. 12g
- 3D-файл M10Q-3100_step.zip
Прошивки
- ArduPilot AP_Periph: MatekL431-GPS
- Обновление через DroneCAN GUI Tool или Mission Planner (AP_Periph.bin)
- Обновление через STLink (AP_Periph_with_bl.hex)
Комплектация
- 1x M10Q-3100
- 1x JST-GH-4P - JST-GH-4P 20 см силиконовый провод
Советы и примечания
- на M10-F4-3100, 3 магнитные катушки имеют мало паяльной пасты, чтобы избежать избытка «наклона» их, что приводит к некоторым неточностям в показаниях компаса. Любые сильные удары обязательно разъединят их, особенно «высокую катушку» Sen-Z-f. Пожалуйста, используйте этот прецизионный модуль с осторожностью.
- Поместите магнитометр вдали от силовых линий/ESC/моторов/материалов на основе железа. >=10 см.
- 2 ушка для крепления могут быть отрезаны, если они вам не нужны.
- Конфигурация по умолчанию на модуле M10 GNSS с ublox FW 5.1 - одновременный прием GPS, Galileo, GLONASS и BeiDou B1C с включенными QZSS и SBAS.
- Начиная с u-blox GNSS FW3.01, тайм-импульс выравнивается по времени UTC, и это время устанавливается только после загрузки високосной секунды. Это может занять до 12,5 мин. Вероятно, светодиод PPS не будет мигать сразу после фиксации GPS в 3D.
- В M10Q-3100 предусмотрена возможность сброса настроек приемника. Перекрытие площадки «Rst» (рядом со стрелкой) с землей на время не менее 100 мс вызовет холодный старт. Сброс удалит всю информацию и вызовет холодный старт. Его следует использовать только в качестве варианта восстановления. Если вы уверены, что с проводкой и настройками все в порядке, но GNSS не может принять ни одного спутника через десятки минут, попробуйте сделать сброс.
- Царапины на керамической антенне - результат настройки антенны.
DroneCAN и MSP параметры
- AP_Periph fw «MatekL431-GPS» https://firmware.ardupilot.org/AP_Periph/stable/MatekL431-GPS/
- Обновление через DroneCAN GUI Tool или Mission Planner (AP_Periph.bin)
- Обновление через STLink (AP_Periph_with_bl.hex)
Подключение по CAN (протокол UAVCAN)
- M10Q-3100 5V - полетный контроллер 4.5V ~ 5.3V
- M10Q-3100 CAN-H - бортовой контроллер CAN High
- M10Q-3100 CAN-L - бортовой контроллер CAN Low
- M10Q-3100 G - Полетный контроллер G/GND
Параметры FC UAVCAN (ArduPilot)
- CAN_D1_PROTOCOL -> 1
- CAN_P1_DRIVER -> 1
- GPS_TYPE -> 9 (DroneCAN)
- COMPASS_TYPEMASK -> 0 (убедитесь, что DroneCAN не отмечен)
---------------------------------------
Подключение UART (протокол MSP)
- M10Q-3100 5V - полетный контроллер 4.0V ~ 5.3V
- M10Q-3100 TX2 - запасной UART_RX полетного контроллера
- M10Q-3100 G - Полетный контроллер G/GND
ArduPilot (начиная с версии 4.1.x) Параметры FC
- Serialx_PROTOCOL = 32 (MSP), где x - SERIAL порт, используемый для подключения к автопилоту.
- Serialx_BAUD = 115, где x - SERIAL-порт, используемый для подключения на автопилоте.
- ТИП GPS = 19 (MSP)
- COMPASS_TYPEMASK 0 (или убедитесь, что бит MSP не отмечен)
INAV (начиная с версии 2.6) Параметры FC
- M10Q-3100 совместим с любым полетным контроллером, поддерживаемым INAV через запасной UART.
- На вкладке портов включите MSP на соответствующем UART, к которому подключен M10Q-3100, НЕ включайте «GPS» на этом UART. выберите Baudrate 115200.
- функция GPS
- set gps_provider = MSP
- set mag_hardware = MSP
- установите align_mag = CW90, если компас установлен плоской стороной со стрелкой, направленной вперед, и стрелка полетного контроллера также направлена вперед.
| Вес: | 12 г |
| Компас: | RM3100 |
| Производитель: | Matek |
| Протокол связи в микроконтроллерах и периферии: | CAN , DroneCAN , MSP , UART |
| Рабочее напряжение: | 4.5-5.3 В |
| Разъём: | JST-GH 4 pin |
| Ток: | 50 мА |
Отзывы
Пока нет отзывов



, шина I2C")




