Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.
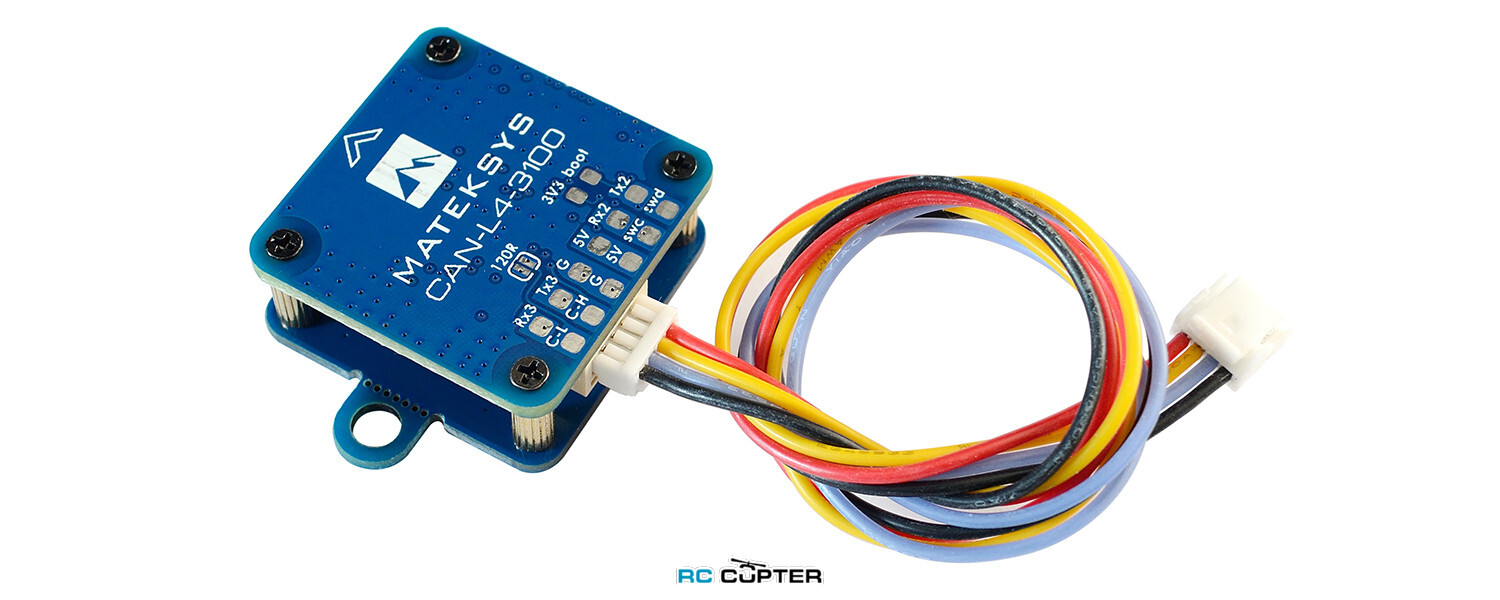


Компас Matek CAN-L4-3100 DroneCAN Magnetometer RM3100 AP_Periph
под заказ, пишите
- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
CAN-L4-3100 - это CAN магнитометр профессионального уровня, основанный на прошивке ArudPilot AP_Periph и RM3100.
Технология датчика RM3100 обеспечивает высокое разрешение, низкое энергопотребление, высокую помехоустойчивость сигнала, большой динамический диапазон и высокую частоту дискретизации. Измерения стабильны по температуре и не подвержены влиянию дрейфа смещения.
Технические характеристики
- Геомагнитный датчик PNI RM3100
- Узел CAN MCU: STM32L431xC, 256 КБ флэш-памяти
- Интерфейс
CAN, протокол DroneCAN
UART2, выход MSP (MatekL431-Periph fw)
UART3, для внешнего модуля GNSS
Отладка ST, SWCLK и SWDIO - СВЕТОДИОД
Синий, быстрое мигание, загрузка
Синий, медленное мигание, работа
Красный, индикатор 3,3 В - Питание для платы CAN-L4-3100: 4.5~5.5V @5V pad/pin
- Потребляемая мощность: 22 мА
- Рабочие температуры: -40~85 °C
- Размер платы: 36мм*25мм*10мм. 6g
- 3D-файл CAN-L4-3100_step.zip
Прошивка
- ArduPilot AP_Periph: MatekL431-GPS или MatekL431-Periph
- Обновление через DroneCAN GUI Tool или Mission Planner (AP_Periph.bin)
- Обновление через STLink (AP_Periph_with_bl.hex)
Параметры
- CAN_P1_DRIVER = 1, если подключен к порту CAN bus1 или CAN_P2_DRIVER = 1, если подключен к порту CAN bus2
- COMPASS_AUTODEC = 1
Комплектация
- плата CAN-L4-3100 - 1 шт
- JST-GH-4P - JST-GH-4P 20 см силиконовый провод - 1 шт
Советы
На CAN-L4-3100 предустановлена прошивка «MatekL431-GPS».
Поместите магнитометр вдали от линий питания, ESC/моторов/материалов на основе железа. >=10 см
2 ушка для крепления можно отрезать, если они не нужны.
Если провода CAN слишком длинные, установите перемычку «120R».
---------------------------
Подключение UART (протокол MSP)
CAN-L4-3100 5V - FC 4.0V ~ 5.3V
CAN-L4-3100 G - FC G/GND
CAN-L4-3100 TX2 - FC запасной UART_RX
Параметры FC ArduPilot (начиная с версии 4.1.x)
Serialx_PROTOCOL = 32 (MSP), где x - SERIAL порт, используемый для подключения к автопилоту.
Serialx_BAUD = 115, где x - SERIAL-порт, используемый для подключения на автопилоте.
COMPASS_TYPEMASK 0 (или убедитесь, что бит MSP не отмечен)
INAV (начиная с версии 2.6) Параметры FC
На вкладке порты включите MSP на соответствующем UART, к которому подключен CAN-L4-3100, НЕ включайте другие функции на этом UART. выберите Baudrate 115200.
set mag_hardware = MSP
установите align_mag = CW90, если компас установлен плоским образом со стрелкой, направленной вперед, и стрелка полетного контроллера также направлена вперед.
Дополнительная информация:
| Вес: | 6 г |
| Компас: | RM3100 |
| Производитель: | Matek |
| Протокол связи в микроконтроллерах и периферии: | CAN , DroneCAN , MSP , UART |
| Рабочее напряжение: | 4.5-5.5 В |
| Разъём: | JST-GH 4 pin |
| Ток: | 22 мА |






 Matek AP_PERIPH CAN-L431 (CAN, UART, PWM, I2C, SPI в DroneCAN)")



