Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.





Полётный контроллер HolyBro Pixhawk 4 + GPS M8N + PM07
под заказ, пишите
- Описание
- Характеристики
- Сопутствующие товары
- Аналоги
- Отзывы (0)
ВНИМАНИЕ: Данная версия (pixhawk 4) снята с производства. Актуальная аналогичная модель полётного контроллера от Holybro - Pixhawk 6C
Полётный контроллер Pixhawk 4 от Holybro + GPS M8N + модуль питания PM07
Данный полётный контроллер является аналогом Pixhawk CUBE от HEX и Pixhawk CUAV x7.
Разница между полётными контроллерами Pixhawk Holybro и соответствие PX от других производителей
Возможности:
-
The most advanced development kit for the PX4® autopilot
-
Pixhawk® 4 is the latest update to the successful family of Pixhawk flight controllers. It is designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware.
-
It features the currently most advanced processor technology from STMicroelectronics®, sensor technology from Bosch®, InvenSense®, and a NuttX real-time operating system, delivering incredible performance, flexibility, and reliability for controlling any autonomous vehicle.
-
The Pixhawk 4’s microcontroller now has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot.
-
High-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances.
-
The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules.
-
The Pixhawk 4 autopilot development kit is perfect for developers at corporate research labs, startups, and for academics (research, professors, students).
Характеристики:
- Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Redundant power supply inputs and automatic failover
- External safety button for easy motor activation
- New sensors with higher temperature stability
- Multicolor LED indicator
- Integrated vibrations isolation
- High-power, multi-tone piezo audio indicator
- microSD card for long-time high-rate logging
- 16 PWM outputs
- Increased ease-of-use: pre-installed with most recent PX4 (v1.8)
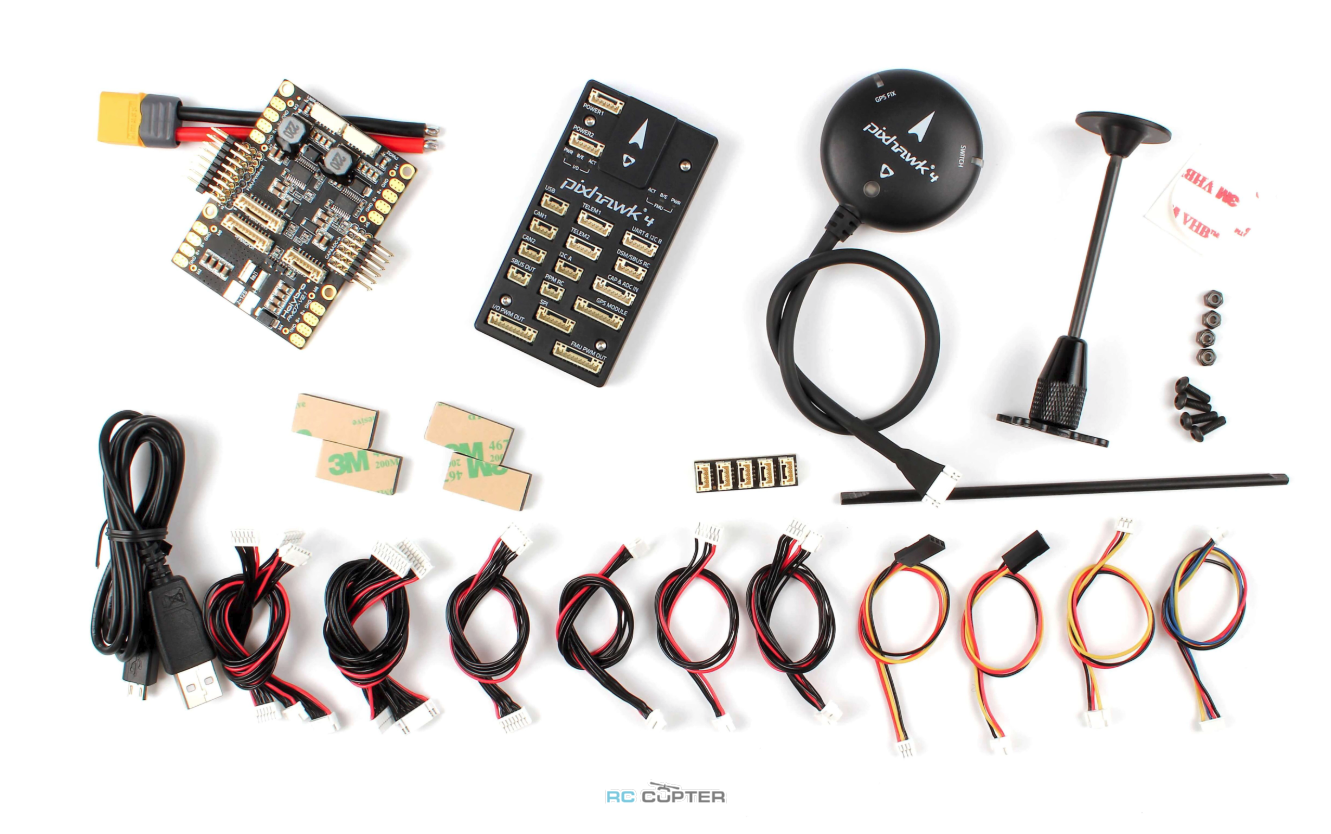
В комплекте:
- Полётный контроллер Pixhawk4 by Holybro - 1шт
- Модуль GPS M8N для Pixhawk4 - 1шт
- Модуль питания PM07 для Pixhawk 4 (Power Management Board) - 1шт
- Плата I2C splitter Board - 1шт
- Кабель 6 to 6 pin (power) - 3шт
- Кабель 4 to 4 pin (CAN) - 2шт
- Кабель 10 to 10 pin (PWM) - 2шт
- Кабель 8 to 8 pin (AUX) - 1шт
- Кабель 7 to 7 pin (SPI) - 1шт
- Кабель 6 to 6 pin (Debug) - 1шт
- Кабель PPM/SBUS out - 1шт
- Кабель для XSR - 1шт
- Кабель для DSMX - 1шт
- Кабель для SBUS - 1шт
- Кабель USB - 1шт
- Подставка под модуль GPS 'X'type - 1шт
- Подставка под модуль GPS 70mm & 140mm carbon rod stand off - 2шт
- 6*3 2.54mm pitch Horizontal Pin - 1шт
- 8*3 2.54mm pitch Horizontal Pin - 2шт
- Набор липких демпферов - 1шт
- Инструкция к полётному контроллеру Pixhawk 4 - 1шт
- Инструкция к модулю GPS - 1шт
- Инструкция к модулю питания PM07 - 1шт
Инструкции:
- Pixhawk4 datasheet.pdf
- Pixhawk4 Pinouts.pdf
- Pixhawk4 quickstartguide.pdf
- PM07 Quick-Start-Guide.pdf
- Pixhawk4 GPS Quick-Start-Guide.pdf
Пример схемы подключения электроники на базе полётного контроллера Holybro Pixhawk 6
| Производитель: | Holybro |



 v3")
 v3")

 для Pixhawk 4/6c")
 для Pixhawk/APM")
")



 + GPS NEO-6M")
")





