Режим работы пункта самовывоза:
Пн-пт 10:00-21:00, сб-вс 10:00-19:00.
Колл-центр работает с 10 до 18 по будням.
")
")

")
ESC регулятор мотора 2N-2N на шине CAN (4S, 300-700 Вт, STM32F103)
- Описание
- Характеристики
- Аналоги
- Отзывы (0)
Новейший Hi-End регулятор от немецкой компании Germany Aerolab на помехозащищённой шине CAN.
Регулятор сконструирован из высококачественных электронных компонентов специально для использования в профессиональных мультикоптерах, где особенно важны надёжность, скорость и точность управления БК моторами.
Регуляторы хода от Germany Aerolab гарантированно качественно работают с самыми популярными платами: немецкой МК, китайской DJI и CopterControl от OpenPilot.
Регулятор является средним в классе по мощности (300 – 700 Ватт), и предназначен для большинства классических моторов.
В ходе испытаний использовались моторы AXI2814/22, AXI2814/20, AXI2820/14, AXI2826/12, различные модели T-Motors, Germany AeroLab MT4008, DUALSKY XM5015TE с нагрузками от 12 до 16 дюймов (пропеллеры APC, карбоновые и деревянные)
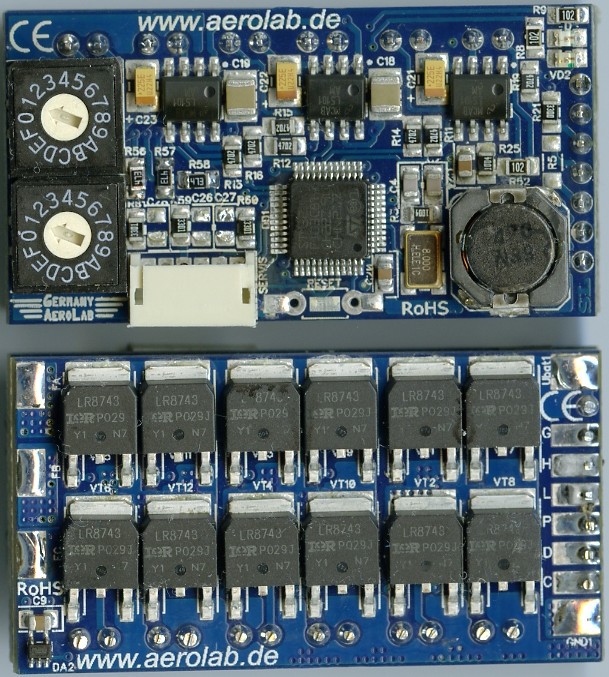
Регулятор хода выполнен по «бутербродной» технологии чтобы сохранить минимальными посадочные размеры платы и разделить сигнальную и силовую части для дополнительной защиты от паразитных наводок и помех.
На фото выше видно, что платы между собой жёстко скреплены.
Как видно, на лицевой стороне располагаются 2 роторных (кодовых) переключателя, один из них задаёт адрес регулятора, вторым переключателем можно задать режим работы.При этом заранее могут быть установлены 16 наборов параметров (сетов) и соответственно 16 адресов (в дополнительной конфигурации еще 32 адреса, что дает в сумме 48 уникальных адресов). На лицевой стороне установлен процессор, часть импульсного преобразователя, драйвера управления выходными каскадами, сервисный 6-ти контактный разъём для обновления прошивки, светодиодная индикация.
С обратной стороны 12 ключевых транзисторов, датчик температуры, колодка и контакты подключения управления, питания, выходных проводов на мотор.
Верхний силовой контакт +U — силовой плюс питания
Нижний силовой контакт GND — силовой минус питания
Слева выходы фаз А, В, С – выходы на бесколлекторный двигатель
В середине справо на рисунке — контакты для сигналов управления, основные CAN H, CAN L, и дополнительные PWM и I2C. Для PWM возможно потребуется дополнительный контакт GND, сверху предусмотрен контакт (индекс на плате G).
Транзисторы рассчитаны на импульсный ток до 160-170А. Выходной каскад практически не нагревается при работе на 2кг квадрокоптере с моторами AXI2814/22 с пропеллерами 12х4.5 или 13х6,5 при питании от 4S Li-Po (16.8V).
Для улучшения качества работы регулятора применен импульсный преобразователь напряжения, а для управления выходным каскадом мощные драйвера на ток до 2А.
Применение импульсного преобразователя обусловлено тем, что при питании регулятора свыше 12В линейные преобразователи, установленные в большинстве массовых авиамодельных регуляторов хода сильно греются даже без нагрузки, в то время, как импульсный удерживает стабильную температуру не более 45 градусов.
Назначение импульсного преобразователя в основном для формования напряжения питания драйверов выходного каскада и для других нужд электрической схемы.
Этот тип регулятора рассчитан на питание 4S, но в других версиях применяются и варианты на 6S без визуального изменения конструкции.
Документация и файлы
Актуальная документация и прошивки доступны на специальном портале
| Вес: | 22 г |
| Пиковая мощность: | 700 Вт |
| Пиковый ток: | 160 А |
| Производитель: | Germany Aerolab |
| Протокол связи в микроконтроллерах и периферии: | CAN |
| Рекомендованная батарея: | 4S (16V) |
| Шина: | CAN, PWM |


")


")


 в трубку")
")